Lidar to grid map

This simple tutorial shows how to read LIDAR (range) measurements from a file and convert it to occupancy grid.
Occupancy grid maps (Hans Moravec, A.E. Elfes: High resolution maps
from wide angle sonar, Proc. IEEE Int. Conf. Robotics Autom. (1985))
are a popular, probabilistic approach to represent the environment. The
grid is basically discrete representation of the environment, which
shows if a grid cell is occupied or not. Here the map is represented as
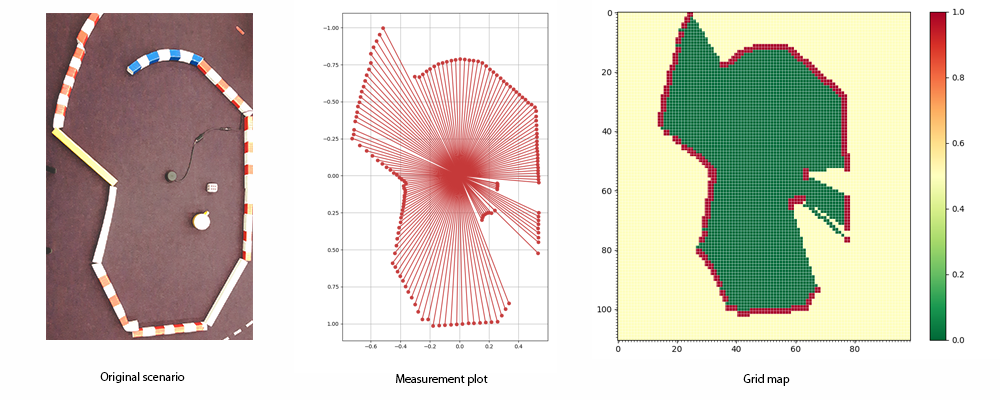
a numpy array, and numbers close to 1 means the cell is occupied
(marked with red on the next image), numbers close to 0 means they are
free (marked with green). The grid has the ability to represent
unknown (unobserved) areas, which are close to 0.5.
In order to construct the grid map from the measurement we need to
discretise the values. But, first let’s need to import some
necessary packages.
import math
import numpy as np
import matplotlib.pyplot as plt
from math import cos, sin, radians, pi
The measurement file contains the distances and the corresponding angles
in a csv (comma separated values) format. Let’s write the
file_read method:
def file_read(f):
"""
Reading LIDAR laser beams (angles and corresponding distance data)
"""
measures = [line.split(",") for line in open(f)]
angles = []
distances = []
for measure in measures:
angles.append(float(measure[0]))
distances.append(float(measure[1]))
angles = np.array(angles)
distances = np.array(distances)
return angles, distances
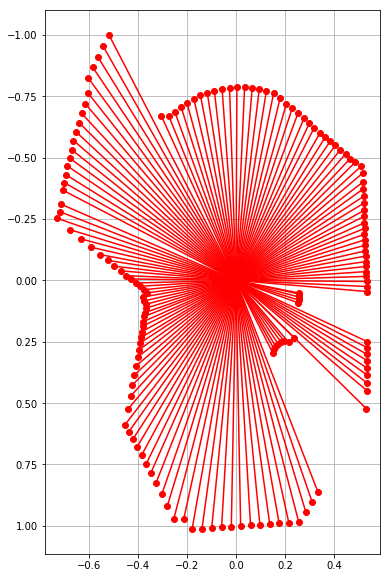
From the distances and the angles it is easy to determine the x and
y coordinates with sin and cos. In order to display it
matplotlib.pyplot (plt) is used.
ang, dist = file_read("lidar01.csv")
ox = np.sin(ang) * dist
oy = np.cos(ang) * dist
plt.figure(figsize=(6,10))
plt.plot([oy, np.zeros(np.size(oy))], [ox, np.zeros(np.size(oy))], "ro-") # lines from 0,0 to the
plt.axis("equal")
bottom, top = plt.ylim() # return the current ylim
plt.ylim((top, bottom)) # rescale y axis, to match the grid orientation
plt.grid(True)
plt.show()
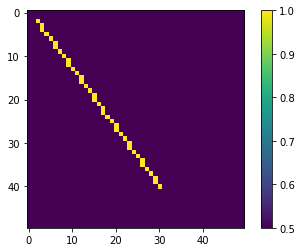
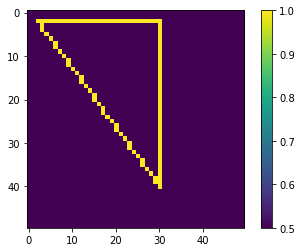
The lidar_to_grid_map.py contains handy functions which can used to
convert a 2D range measurement to a grid map. For example the
bresenham gives the a straight line between two points in a grid
map. Let’s see how this works.
import lidar_to_grid_map as lg
map1 = np.ones((50, 50)) * 0.5
line = lg.bresenham((2, 2), (40, 30))
for l in line:
map1[l[0]][l[1]] = 1
plt.imshow(map1)
plt.colorbar()
plt.show()
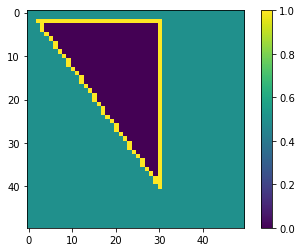
line = lg.bresenham((2, 30), (40, 30))
for l in line:
map1[l[0]][l[1]] = 1
line = lg.bresenham((2, 30), (2, 2))
for l in line:
map1[l[0]][l[1]] = 1
plt.imshow(map1)
plt.colorbar()
plt.show()
To fill empty areas, a queue-based algorithm can be used that can be used on an initialized occupancy map. The center point is given: the algorithm checks for neighbour elements in each iteration, and stops expansion on obstacles and free boundaries.
from collections import deque
def flood_fill(cpoint, pmap):
"""
cpoint: starting point (x,y) of fill
pmap: occupancy map generated from Bresenham ray-tracing
"""
# Fill empty areas with queue method
sx, sy = pmap.shape
fringe = deque()
fringe.appendleft(cpoint)
while fringe:
n = fringe.pop()
nx, ny = n
# West
if nx > 0:
if pmap[nx - 1, ny] == 0.5:
pmap[nx - 1, ny] = 0.0
fringe.appendleft((nx - 1, ny))
# East
if nx < sx - 1:
if pmap[nx + 1, ny] == 0.5:
pmap[nx + 1, ny] = 0.0
fringe.appendleft((nx + 1, ny))
# North
if ny > 0:
if pmap[nx, ny - 1] == 0.5:
pmap[nx, ny - 1] = 0.0
fringe.appendleft((nx, ny - 1))
# South
if ny < sy - 1:
if pmap[nx, ny + 1] == 0.5:
pmap[nx, ny + 1] = 0.0
fringe.appendleft((nx, ny + 1))
This algotihm will fill the area bounded by the yellow lines starting from a center point (e.g. (10, 20)) with zeros:
flood_fill((10, 20), map1)
map_float = np.array(map1)/10.0
plt.imshow(map1)
plt.colorbar()
plt.show()
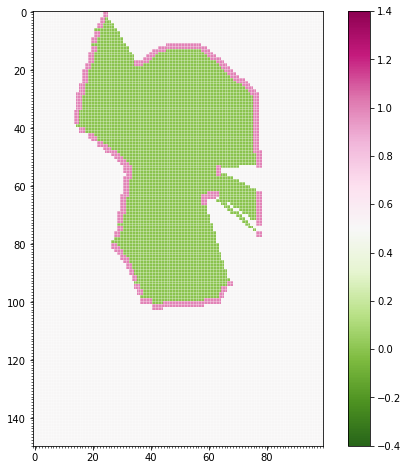
Let’s use this flood fill on real data:
xyreso = 0.02 # x-y grid resolution
yawreso = math.radians(3.1) # yaw angle resolution [rad]
ang, dist = file_read("lidar01.csv")
ox = np.sin(ang) * dist
oy = np.cos(ang) * dist
pmap, minx, maxx, miny, maxy, xyreso = lg.generate_ray_casting_grid_map(ox, oy, xyreso, False)
xyres = np.array(pmap).shape
plt.figure(figsize=(20,8))
plt.subplot(122)
plt.imshow(pmap, cmap = "PiYG_r")
plt.clim(-0.4, 1.4)
plt.gca().set_xticks(np.arange(-.5, xyres[1], 1), minor = True)
plt.gca().set_yticks(np.arange(-.5, xyres[0], 1), minor = True)
plt.grid(True, which="minor", color="w", linewidth = .6, alpha = 0.5)
plt.colorbar()
plt.show()
The grid map is 150 x 100 .