Nonlinear Model Predictive Control with C-GMRES

Mathematical Formulation
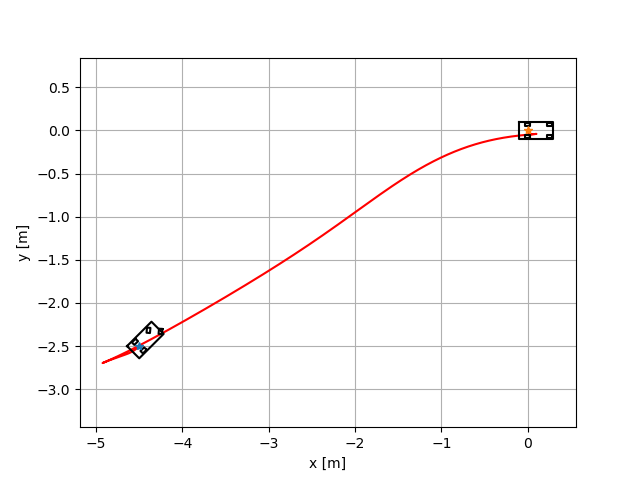
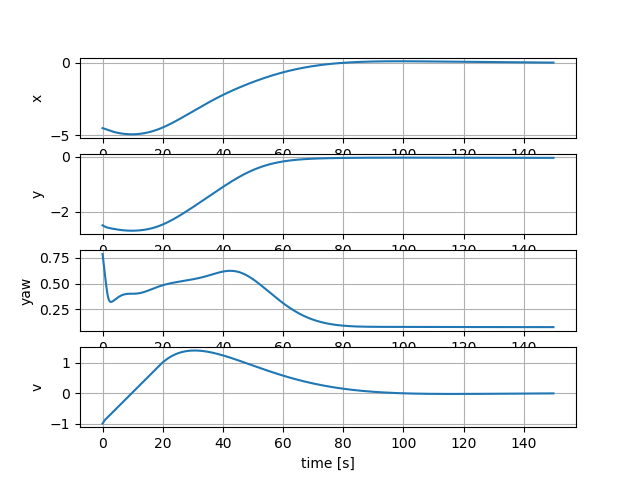
Motion model is
(tan is not good for optimization)
Cost function is
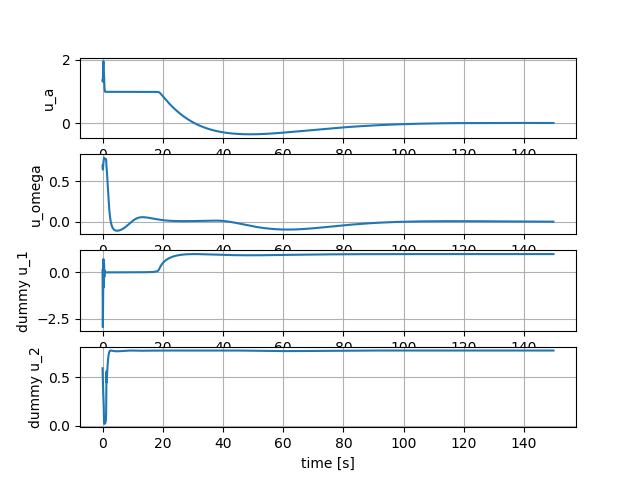
Input constraints are
So, Hamiltonian is
Partial differential equations of the Hamiltonian are:
\(\begin{equation*} \frac{\partial H}{\partial \bf{x}}=\\ \begin{bmatrix} \frac{\partial H}{\partial x}= 0&\\ \frac{\partial H}{\partial y}= 0&\\ \frac{\partial H}{\partial \theta}= -\lambda_1vsin\theta+\lambda_2vcos\theta&\\ \frac{\partial H}{\partial v}=-\lambda_1cos\theta+\lambda_2sin\theta+\lambda_3\frac{1}{WB}sin(u_{\delta})&\\ \end{bmatrix} \\ \end{equation*}\)
\(\begin{equation*} \frac{\partial H}{\partial \bf{u}}=\\ \begin{bmatrix} \frac{\partial H}{\partial u_a}= u_a+\lambda_4+2\rho_1u_a&\\ \frac{\partial H}{\partial u_\delta}= u_\delta+\lambda_3\frac{v}{WB}cos(u_{\delta})+2\rho_2u_\delta&\\ \frac{\partial H}{\partial d_a}= -\phi_a+2\rho_1d_a&\\ \frac{\partial H}{\partial d_\delta}=-\phi_\delta+2\rho_2d_\delta&\\ \end{bmatrix} \\ \end{equation*}\)