Dubins path planning
A sample code for Dubins path planning.

Dubins path
Dubins path is a analytical path planning algorithm for a simple car model.
It can generates a shortest path between two 2D poses (x, y, yaw) with maximum curvature constraint and tangent(yaw angle) constraint.
Generated paths consist of 3 segments of maximum curvature curves or a straight line segment.
Each segment type can is categorized by 3 type: ‘Right turn (R)’ , ‘Left turn (L)’, and ‘Straight (S).’
Possible path will be at least one of these six types: RSR, RSL, LSR, LSL, RLR, LRL.
Dubins path planner can output each segment type and distance of each course segment.
For example, a RSR Dubins path is:
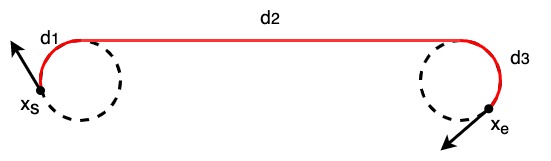
Each segment distance can be calculated by:
\(\alpha = mod(-\theta)\)
\(\beta = mod(x_{e, yaw} - \theta)\)
\(p^2 = 2 + d ^ 2 - 2\cos(\alpha-\beta) + 2d(\sin\alpha - \sin\beta)\)
\(t = atan2(\cos\beta - \cos\alpha, d + \sin\alpha - \sin\beta)\)
\(d_1 = mod(-\alpha + t)\)
\(d_2 = p\)
\(d_3 = mod(\beta - t)\)
where \(\theta\) is tangent and d is distance from \(x_s\) to \(x_e\)
A RLR Dubins path is:
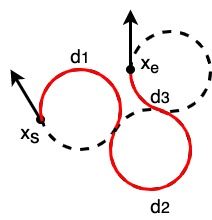
Each segment distance can be calculated by:
\(t = (6.0 - d^2 + 2\cos(\alpha-\beta) + 2d(\sin\alpha - \sin\beta)) / 8.0\)
\(d_2 = mod(2\pi - acos(t))\)
\(d_1 = mod(\alpha - atan2(\cos\beta - \cos\alpha, d + \sin\alpha - \sin\beta) + d_2 / 2.0)\)
\(d_3 = mod(\alpha - \beta - d_1 + d_2)\)
You can generate a path from these information and the maximum curvature information.
A path type which has minimum course length among 6 types is selected, and then a path is constructed based on the selected type and its distances.
API
- PathPlanning.DubinsPath.dubins_path_planner.plan_dubins_path(s_x, s_y, s_yaw, g_x, g_y, g_yaw, curvature, step_size=0.1, selected_types=None)[source]
Plan dubins path
- Parameters:
s_x (float) – x position of the start point [m]
s_y (float) – y position of the start point [m]
s_yaw (float) – yaw angle of the start point [rad]
g_x (float) – x position of the goal point [m]
g_y (float) – y position of the end point [m]
g_yaw (float) – yaw angle of the end point [rad]
curvature (float) – curvature for curve [1/m]
step_size (float (optional)) – step size between two path points [m]. Default is 0.1
selected_types (a list of string or None) – selected path planning types. If None, all types are used for path planning, and minimum path length result is returned. You can select used path plannings types by a string list. e.g.: [“RSL”, “RSR”]
- Returns:
x_list (array) – x positions of the path
y_list (array) – y positions of the path
yaw_list (array) – yaw angles of the path
modes (array) – mode list of the path
lengths (array) – arrow_length list of the path segments.
Examples
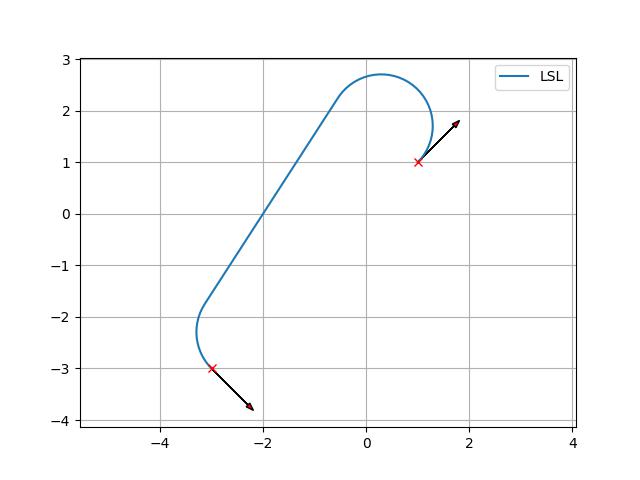
You can generate a dubins path.
>>> start_x = 1.0 # [m] >>> start_y = 1.0 # [m] >>> start_yaw = np.deg2rad(45.0) # [rad] >>> end_x = -3.0 # [m] >>> end_y = -3.0 # [m] >>> end_yaw = np.deg2rad(-45.0) # [rad] >>> curvature = 1.0 >>> path_x, path_y, path_yaw, mode, _ = plan_dubins_path( start_x, start_y, start_yaw, end_x, end_y, end_yaw, curvature) >>> plt.plot(path_x, path_y, label="final course " + "".join(mode)) >>> plot_arrow(start_x, start_y, start_yaw) >>> plot_arrow(end_x, end_y, end_yaw) >>> plt.legend() >>> plt.grid(True) >>> plt.axis("equal") >>> plt.show()