Normal vector estimation
Normal vector calculation of a 3D triangle
A 3D point is as a vector:
When there are 3 points in 3D space, \(p_1, p_2, p_3\),
we can calculate a normal vector n of a 3D triangle which is consisted of the points.
where
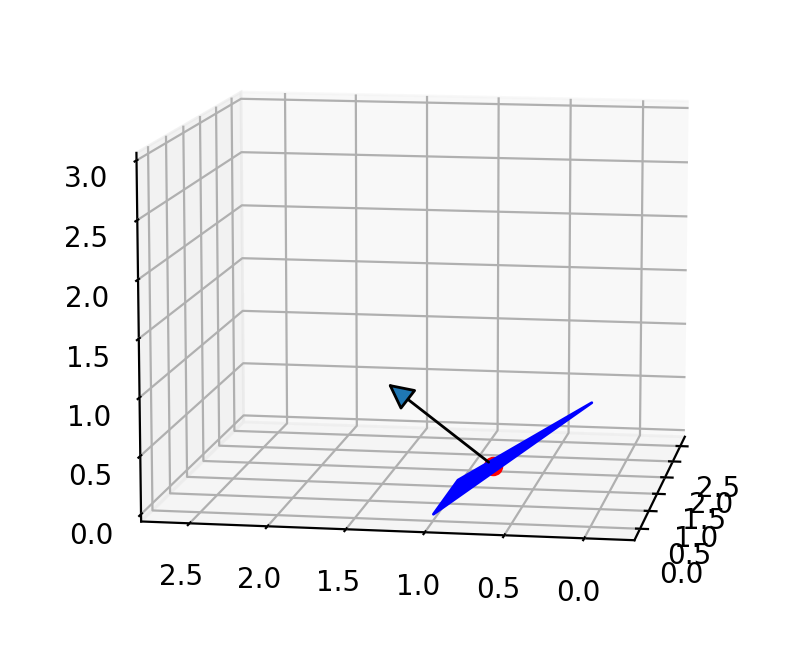
This is an example of normal vector calculation:
API
Normal vector estimation with RANdam SAmpling Consensus(RANSAC)
Consider the problem of estimating the normal vector of a plane based on a set of N 3D points where a plane can be observed.
There is a way that uses all point cloud data to estimate a plane and a normal vector using the least-squares method
However, this method is vulnerable to noise of the point cloud.
In this document, we will use a method that uses RANdam SAmpling Consensus(RANSAC) to estimate a plane and a normal vector.
RANSAC is a robust estimation methods for data set with outliers.
This RANSAC based normal vector estimation method is as follows:
Select 3 points randomly from the point cloud.
Calculate a normal vector of a plane which is consists of the sampled 3 points.
Calculate the distance between the calculated plane and the all point cloud.
If the distance is less than a threshold, the point is considered to be an inlier.
Repeat the above steps until the inlier ratio is greater than a threshold.
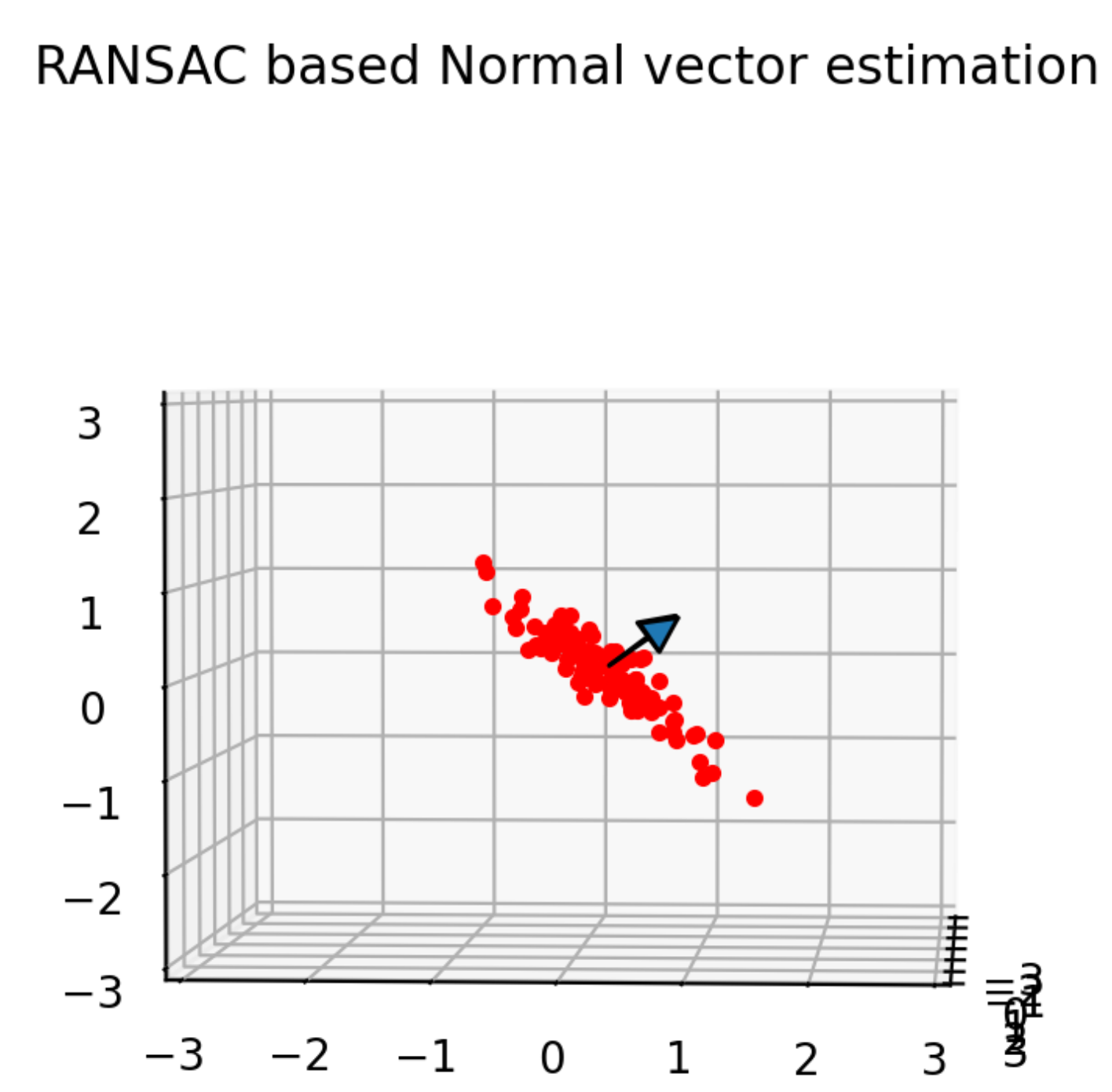
This is an example of RANSAC based normal vector estimation:
API
- Mapping.normal_vector_estimation.normal_vector_estimation.ransac_normal_vector_estimation(points_3d, inlier_radio_th=0.7, inlier_dist=0.1, p=0.99)[source]
RANSAC based normal vector estimation
- Parameters:
points_3d (np.array) – 3D points (N, 3)
inlier_radio_th (float) – Inlier ratio threshold. If inlier ratio is larger than this value, the iteration is stopped. Default is 0.7.
inlier_dist (float) – Inlier distance threshold. If distance between points and estimated plane is smaller than this value, the point is inlier. Default is 0.1.
p (float) – Probability that at least one of the sets of random samples does not include an outlier. If this probability is near 1, the iteration number is large. Default is 0.99.
- Returns:
center_vector (np.array) – Center of estimated plane. (3,)
normal_vector (np.array) – Normal vector of estimated plane. (3,)