Bezier path planning
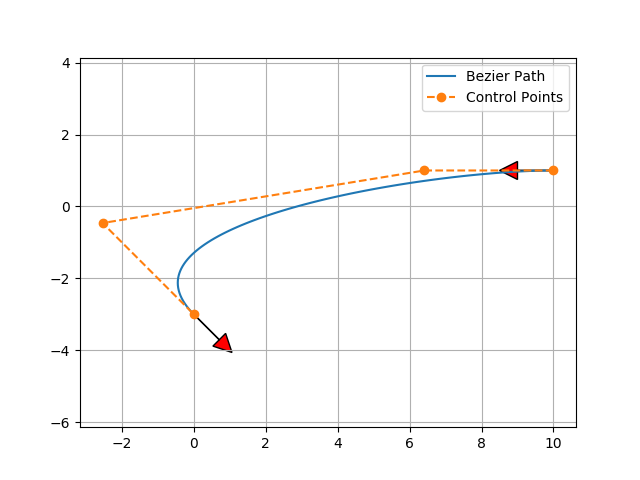
A sample code of Bezier path planning.
It is based on 4 control points Beizer path.
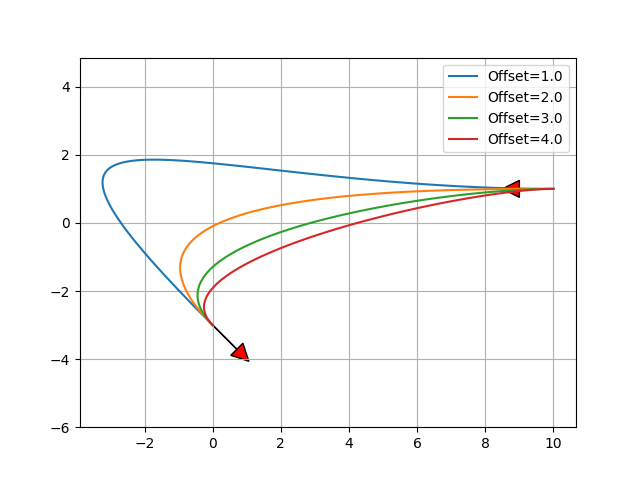
If you change the offset distance from start and end point,
You can get different Beizer course:
Code Link
- PathPlanning.BezierPath.bezier_path.calc_4points_bezier_path(sx, sy, syaw, ex, ey, eyaw, offset)[source]
Compute control points and path given start and end position.
- Parameters:
sx – (float) x-coordinate of the starting point
sy – (float) y-coordinate of the starting point
syaw – (float) yaw angle at start
ex – (float) x-coordinate of the ending point
ey – (float) y-coordinate of the ending point
eyaw – (float) yaw angle at the end
offset – (float)
- Returns:
(numpy array, numpy array)